★如使用手機觀看教學手冊,建議橫屏觀看,以獲得最佳觀看體驗★
¶ 多旋翼(多軸)飛行器簡介
| 多旋翼(多軸)飛行器簡介 | |
|---|---|
| 6軸設計,備有一定程度的冗於能力 | 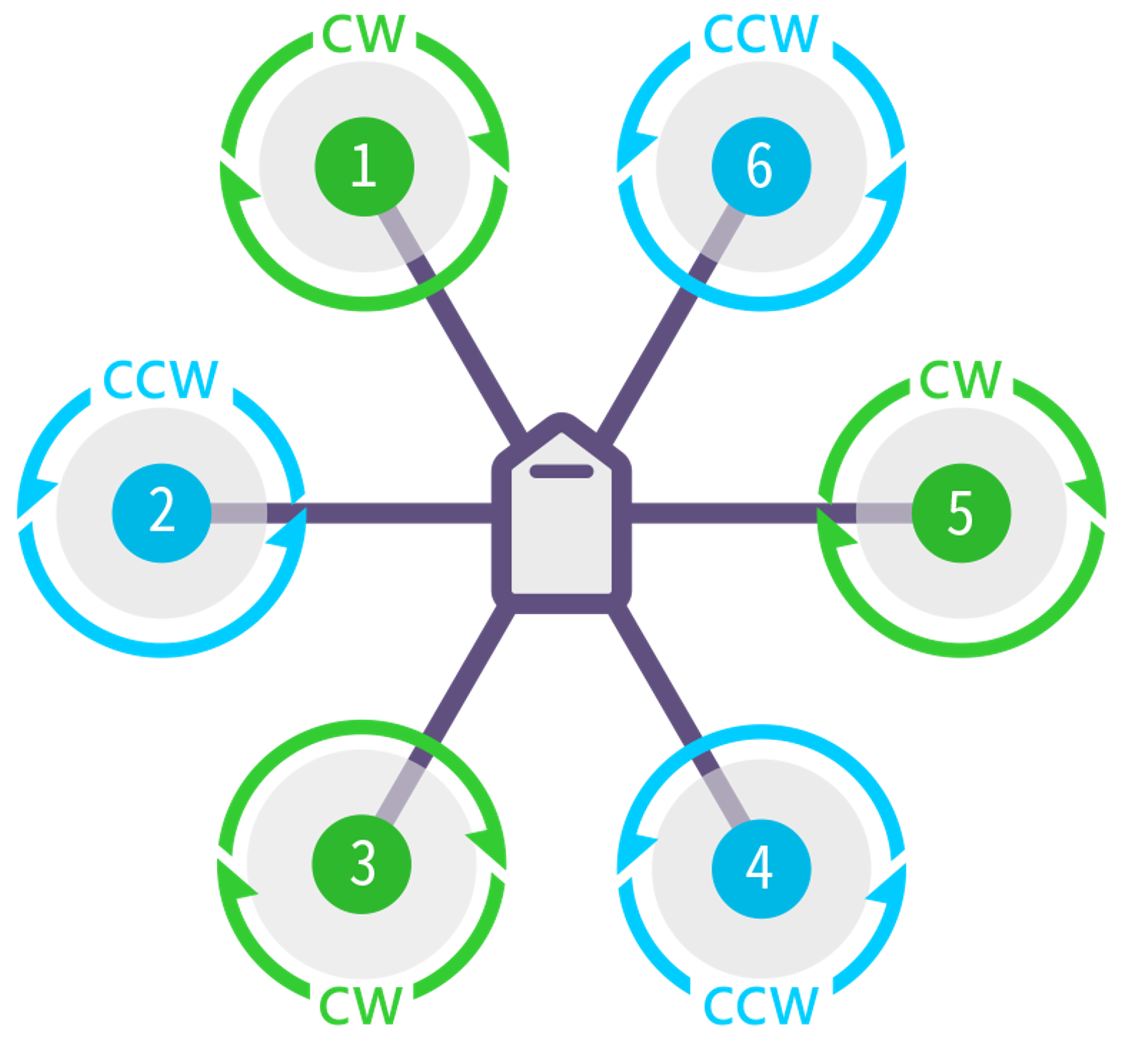 |
| 電量應介於6.0V-7.0V之間 | |
| 槳葉轉向,三順三逆 | |
| 槳葉轉向,相鄰相反,對角相反 | |
| 1 3 5 號機臂為順轉(CW) | |
| 2 4 6 號機臂為逆轉(CCW) | |
¶ 動作原理
| 動作原理 | ||
|---|---|---|
| 解鎖 | 1 2 3 4 5 6 待速 | |
| 上升 | 1 2 3 4 5 6 加速 | |
| 下降 | 1 2 3 4 5 6 減速 | |
| 左旋轉 | 1 3 5 加速 / 2 4 6 減速 | |
| 右旋轉 | 1 3 5 減速 / 2 4 6 加速 | |
| 向前飛 | 3 4 加速 / 1 6 減速 / 2 5 保持 | |
| 向後飛 | 1 6 加速 / 3 4 減速 / 2 5 保持 | |
| 左側飛 | 4 5 6 加速 / 1 2 3 減速 | |
| 右側飛 | 1 2 3 加速 / 4 5 6 減速 | |
| 上鎖 | 1 2 3 4 5 6 熄火 | |
¶ 飛行模式
| Gryphon 飛行模式 | ||
|---|---|---|
| STABILIZE (姿態模式) |
僅控制姿態,其餘動作均由飛手修正及操作(此模式已關閉) |  |
| ALTITUDE (定高模式) |
僅控制姿態及高度,若無進行修正及操作,將受外力而轉向或是飄移 |  |
| GPS (定點模式) |
控制姿態、高度及水平,此模式下若無進行操作,則停懸於原點 |  |
| WAYPOINT (航點模式) |
於任務規劃完成後,即可使用此模式執行任務 |  |
| LANDING (自動降落) |
可選擇原飛行高度上升五米後進行返航或指定返航高度進行返航 |  |
| TAKE OFF (自動起飛) |
觸發後即自動起飛至指定高度 |  |